 無人潜水機(UUV)
無人潜水機(UUV)
無人潜水機(Unmanned Underwater Vehicle)は、人が乗らずに水中で操作できる潜水機です。(Unmanned Undersea Vehicles としても知られています)
UUVは、自律型潜水機 (AUV)と遠隔操作潜水機 (ROV) の 2つのカテゴリに分類できます。
1.自律型潜水機:Autonomous Underwater Vehicle(AUV)
 AUVは、オペレータによる操作無しで水中を移動することができる潜水機です。あらかじめ決められたルートに沿ってデータを収集するようにプログラムすることができ、受信したデータに応じて決定を下しミッションのパラメータを変更できる機能があるものもあります。
AUVは、オペレータによる操作無しで水中を移動することができる潜水機です。あらかじめ決められたルートに沿ってデータを収集するようにプログラムすることができ、受信したデータに応じて決定を下しミッションのパラメータを変更できる機能があるものもあります。
水中では電波が減衰するため、AUVはGPSナビゲーションに直接頼ることができません。推測航法を使用して位置の推定値を確立できますがエラーによりすぐに悪化します。この位置推定は、水中音響トランスポンダー、近くの水上リファレンスの GPS位置、またはGPS位置を確立するための一時的な浮上からの追加データによって改善することができます。加速度と速度の推定値は、慣性測定ユニットを使用して計算でき、海底の移動速度を測定するソナーに似たデバイスであるドップラー速度ログで改善できます。
2.遠隔操作潜水機:Remotely Operated Vehicle(ROV)
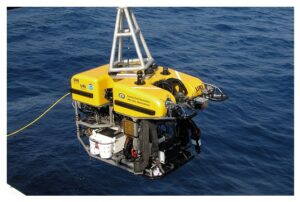 ROVは、AUVと対象的にオペレータによる制御なしでは機能しません。ROVは、ダイバーと有人潜水艦の限界を克服するために開発されました。ROVは、近くの船からオペレータによって遠隔操作され、テザーと電力・通信・データリンクの両方を提供するアンビリカルケーブルを介して操作ユニットに接続されます。
ROVは、AUVと対象的にオペレータによる制御なしでは機能しません。ROVは、ダイバーと有人潜水艦の限界を克服するために開発されました。ROVは、近くの船からオペレータによって遠隔操作され、テザーと電力・通信・データリンクの両方を提供するアンビリカルケーブルを介して操作ユニットに接続されます。
深海または荒い水域で動作するROVには、テザーの長さを調整してケーブルの水中抵抗の影響を最小限に抑えるテザー管理システム(TMS)も装備されています。
用途
UUVは、自由に水中を移動できることから水中ドローンとも呼ばれています。UUVには、カメラ、ソナー、ボトムプロファイラー、マルチビームエコーサウンダなど、さまざまな種類のペイロードを装備することができます。UUVは、構成の多様性と独立した動きを実行する潜水機の能力を組み合わせることで、海底の調査作業における強力なツールになります。例えば、石油・ガスのパイプライン検査、海中探査、海底調査、海底ケーブル検査、海底地質サンプリング、海洋学、環境モニタリング、氷山プロファイリング、氷下調査、水中写真、地雷探知、水中捜索、監視、対潜戦、偵察などさまざまな用途があります。ホスト船から自律的に動作する能力を備えるAUVは世界で最も深い熱水噴出孔から極地の氷床の下まで、極端な環境の探査に適しています。これは、海底を画像化する能力に革命をもたらし、特に深海では水上船から得られるソナー画像よりも高解像度の海底マッピングデータを提供します。
機体設計
UUVの重量は、数十キログラムのものから数千キログラムのものまでさまざまな種類があります。機体のサイズも、人が持ち運べる軽量のものから長さ10メートルを超える大口径の機体までさまざまです。大型機体は、持続性とセンサーのペイロード容量の点で利点があります。小型機体は、持ち運びが容易であることで大きなメリットがあります。
ほとんどのUUV形状は、従来の魚雷形状に準じています。これは、サイズ、利用可能容量、流体力学的効率、および取り扱いの容易さの最良の妥協点と見なされているためです。モジュラー設計により、オペレータがコンポーネントを簡単に変更できる機体もあります。
センサー装備
UUVには複数のセンサーが搭載されており海中・海底の特徴をマッピングすることができます。一般的なセンサーには、コンパス、深度センサー、サイドスキャンソナー、磁力計、サーミスタ、導電率プローブなどがあります。また、一部のUUVには、蛍光光度計(クロロフィルセンサーとも呼ばれます)、濁度センサー、pHや酸素量を測定するセンサーなどの生物学的センサーが装備されています。
ナビゲーション
電波は水中で減衰してしまうため、機体が潜水するとすぐにGPS信号が失われます。よって、無人潜水機が水中を航行する標準的な方法は推測航法です。ただし、ナビゲーションは水中音響測位システムを使用することで改善できます。海底に配置されたベースライントランスポンダのネット内で動作する場合、これはLBLナビゲーションとして知られています。サポート船などの水面リファレンスが利用可能な場合、超短基線 (USBL) または短基線 (SBL) 測位を使用して、音響範囲とベアリング測定により水上艇の既知の (GPS) 位置に対する機体の位置を計算します。位置の推定を改善し、推測航法の誤差を減らすために、UUVは浮上して独自のGPS修正を行うこともできます。位置修正と正確な操縦の間で、UUVに搭載された慣性航法システムは、機体の位置、加速度、および速度を推測航法によって計算します。慣性測定ユニットからのデータを使用して推定を行うことができ、海底・湖底の移動速度を測定するドップラー速度ログ (DVL) を追加することで改善できます。通常、圧力センサーは垂直位置 (機体の深さ) を測定しますが、深度はドップラー速度ログから取得することもできます。
通信
電波は水中では十分に伝搬しないことから、多くのUUVには水中音響モデムが組み込まれており、リモートコマンドコントロールが可能になっています。これらのモデムは通常、独自の通信技術と変調方式を利用しています。水中音響モデムはトランスデューサーを水中に沈め水中で潜水機と通信を行います。深度が深くなるほど低い周波数で通信を行います。近年はレーザーを使用した光無線通信により高速通信が可能なものもあります。
電源
ほとんどのUUVは、充電式バッテリー (リチウムイオン、リチウムポリマー、ニッケル水素など) によって駆動され、何らかの形式のバッテリー管理システム(BMS)が実装されています。BMSは電気自動車やドローンなどにも採用されています。長期の運用を目的とした大型UUVは、燃料電池を利用したものも開発されていますが、これらの機体はメンテナンスが容易でなく廃棄水が生成されるため一部の機体に限られています。近年のトレンドは、さまざまなバッテリーおよび電源システムをスーパーキャパシタと組み合わせることです。
UUVは、深海底の高解像度マップの取得や、広範囲にわたる海の存在の確立などのアプリケーションに使用されます。近年、UUV技術の利用が増加しており、UUV技術への投資が増加し、UUVとそのサービスのより多くの商用サプライヤが設立されています。UUV技術の進化と組み合わされた自律型水中車両のアプリケーション数の増加は、さまざまな最終用途部門でのUUVの普及の増加につながっています。
D-TACQ製 多CHデータ収集装置「SKY-DAQ-UUVシリーズ」
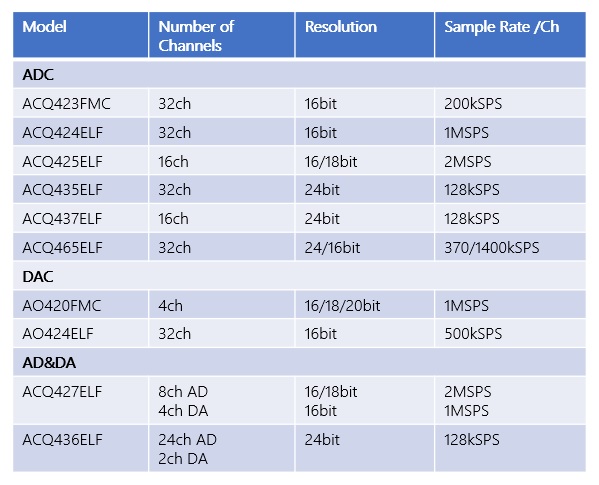
 SKY-DAQ-UUVシリーズは、小型で軽量であることからUUVのサイドスキャンソナー向けに適しています。サイズは86×54.5x227mmとなっており、内部に2枚の専用FMCモジュールを搭載することができます。FMCモジュールは以下のリストから選択することができ、自由に組み合わせが可能です。
SKY-DAQ-UUVシリーズは、小型で軽量であることからUUVのサイドスキャンソナー向けに適しています。サイズは86×54.5x227mmとなっており、内部に2枚の専用FMCモジュールを搭載することができます。FMCモジュールは以下のリストから選択することができ、自由に組み合わせが可能です。
関連製品

SKY-DAQ-UUV-16I:小型ボックス16chソナーデータ収集装置
SKY-DAQ-UUV-32I32O:小型ボックス32ch A/D&32ch D/A ソナーデータ収集装置
SKY-DAQ-UUV-48I4O:小型ボックス 48ch A/D&4ch D/A ソナーデータ収集装置
D-TACQ社について
D-TACQ社は、1999年に英国スコットランドで設立されたマルチチャンネルデータ収集システム製品のプレミアサプライヤです。高品質の同時サンプリングデジタイザを専門としており、多チャンネル、大容量のキャプチャメモリ、およびオープンスタンダードインターフェイスを備えたシステム製品を供給しています。特に、プラズマ核融合研究の診断アプリケーションに提供することをフォーカスしており、高速診断実験用に数百チャネルのシステムを世界中の研究施設に提供してきました。そこでは、D-TACQ社製品の高いチャネル密度、同時キャプチャ機能、オープンソースソフトウェアプラットフォーム、および費用対効果が高く評価されています。D-TACQ社の詳細については、https://www.d-tacq.comを参照してください。